[ Instrument R & D of instrumentation network ] Recently, researchers from the State Key Laboratory of Robotics and the "Space Independent Control Innovation Cross Team" of the Chinese Academy of Sciences have proposed a robotic "locking cage "The capture method, related results were published in the mechanical and electronic field journal IEEE / ASME Transactions on Mechatronics (DOI: 10.1109 / TMECH.2019.2952552).
In the space environment of strong radiation, ultra-low temperature, high vacuum, and microgravity, space robots can replace or assist astronauts to perform space missions; compared with astronauts in place, space robots are in terms of cost, safety, and operating time. Has obvious advantages. Robot autonomous control technology is the core technology to be solved in space robot research. Taking the on-orbit service of freely moving targets in space as an example, reliable target capture is the technical basis for subsequent operations.
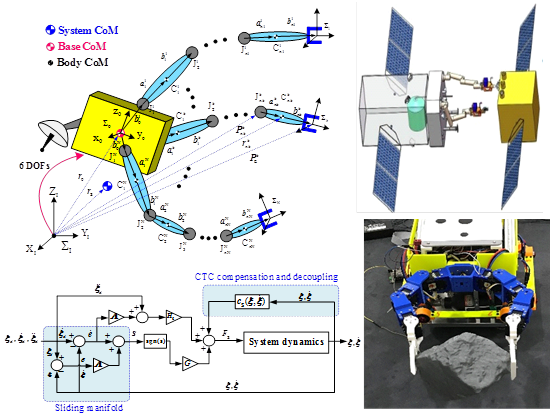
To this end, Zhang Xin and Liu Jinguo of Shenyang Institute of Automation, Chinese Academy of Sciences proposed the use of dual-arm space robots to achieve the capture method of cage pairs. The core idea of ​​this method is to limit the target to a limited closed space, that is, robotized lock cage Medium; and put forward the concept of lock compatibility and corresponding performance indicators for quantitatively describing the ability of the cage to capture the method.
Based on this performance index, a planning algorithm for the pre-capture configuration of a dual-arm space robot is further proposed to obtain the optimal capture capability. Finally, an experimental platform of air-floating space robot was built to verify the effectiveness of the proposed capture method through experiments. The research results have important practical value in future tasks such as on-orbit maintenance and repair, space environment management, and space debris removal.
In recent years, with the support of the National Key R & D Program, the National Ten Thousand People's Plan, the Chinese Academy of Sciences Innovation Cross Team, and the Independent Project of the State Key Laboratory of Robotics, etc., in response to the needs of major missions of the national aircraft in orbit service, the autonomous control technology of space robots, Shenyang Automation Researchers of the Institute have made important progress in the on-orbit capture of space robots, on-orbit filling, intelligent control, space human-computer interaction, etc. The relevant results were published in IEEE Trans. On Cybernetics, IEEE Trans. . On Mechatronics, Nonlinear Dynamics, Acta Astronautica, Science China Technological Sciences, Chinese Journal of Aeronautics and other journals.
Mobile Crusher
Mobile crusher can be divided into crawler type mobile crushing station and wheel type mobile crushing station according to different manufacturing technology.
(1) Characteristics of crawler mobile crushing station:
It is represented by the mobile crushing station for coarse crushing. The crushing technology and quality are advanced, each equipment is composed of 25 basic modules, each module has a rich selection of parts, according to the special requirements of customers, for customers "tailored". Crawler mobile crusher can be used for the crushing and recycling of rock, ore, block road asphalt concrete and dismantled building cement concrete materials.
(2) Characteristics of wheel type mobile crushing station:
The wheeled mobile crushing station is a new product which is convenient for the crushing of construction waste. Flexible combination, strong adaptability: a variety of crushing station has a variety of configurations, users can also according to their own needs to choose the configuration, according to different crushing process requirements can be composed of "crushing after screening", can also be composed of "screening after crushing" process, crushing and screening can also be used alone. The crushing station can be combined into two stages of coarse and fine crushing and screening system according to the actual needs, and can also be combined into three stages of coarse, medium and fine crushing and screening system.
Movable Crusher,Mobile Jaw Crushing Station,Crawler Type Mobile Crushing Station,Jaw Crusher For Mining Plant
Hebei Ladery Import & Export Co., Ltd. , https://www.ladery.com